【衝突回避自動車】エジソンアカデミー レベル②-2
- 2022年8月23日
- 読了時間: 2分
エジソンアカデミー本校を運営している「キープオン」です。
複数回に分けて「アーテックエジソンアカデミー」の魅力をお伝えしていこうと思います。
レベル②-2 衝突回避自動車
・赤外線フォトリフレクタの仕組みと使い方
・「~まで待つ」のブロックを使ったプログラム
を学びます。

①赤外線フォトリフレクタについて学びます

フォトリフレクタとは「光の反射器」という意味で、光の反射を利用したセンサーです。
赤外線を発光し、ブロックなどの対象物から反射した光の大きさを数値であらわします。
対象物の色が明るいとき、距離が近いときに数値が大きくなります。
赤外線は、太陽光にも含まれています。
太陽光が当たる場所とそうでない場所では、数値が大きく変わるので注意が必要になります。
②自動ブレーキシステムのプログラムを作ります
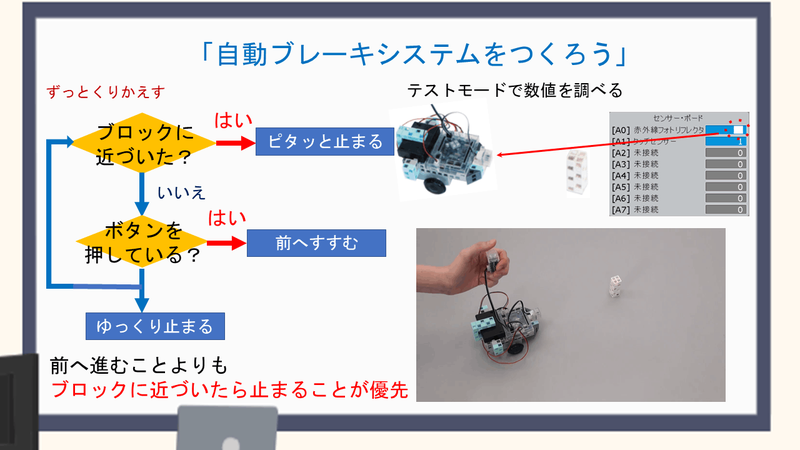
まず、テストモードでブロックとの距離が近づくと、赤外線フォトリフレクタの数値がどのように変わるのかを調べます。
調べた数値を利用して、タッチセンサーを押すと前進する自動車が、ブロックの手前では自動で停止するプログラムを作ります。
③ブロックが近づくと速さが変わるプログラムを作ります

衝突回避自動車に速度が変わる機能を追加します。
まず、DCモーターの速さを変数で設定します。
DCモーターの速さから赤外線フォトリフレクタの数値を引き、その値がDCモーターの速さになります。
近づくと赤外線の数値が大きくなることでゆっくりと進むようになります。
さらにブロックを近づけると、速くバックするプログラムも追加します。
④3つの壁を避けて走るプログラムを作ります

発展課題では、近づくと90度向きを変えて走るプログラムを考えます。
90度に回転する動きは、前回の「自動車の制御」で学んだプログラムを引用します。
「~まで待つ」を使うことで、条件の数値を超えた後の動きが理解しやすくなります。
プログラムの修正と実行を、何度も繰り返しながら課題クリアを目指します。

以上が「衝突回避自動車」のテキスト作例になります。
今回のミッションでは、ブロックを指定の場所へ運ぶ宅配ロボットに挑戦します。
プログラムの解答例は明記されていませんので、テキスト作例で使ったプログラムからアレンジをして、ミッションクリアを目指して取り組んでいきます。
ご拝読いただきありがとうございました。
次回はライントレース自動車になります。
引き続きよろしくお願いいたします。



.png)
コメント